In this project we develop, together with our partners University of Hannover
and Fraunhofer AIS, the software for controlling robots in rescue
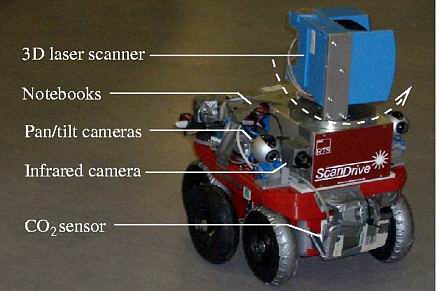
environments. At University of Osnabrück experiments are carried
out with Kurt3D. Kurt3D is a mobile robot of type KURT2 that is
equipped with a 3D laser scanner.
Partners
The team has its origins in the Fraunhofer AiS' RoboCup Rescue Team
"Kurt3D"
(2004) and presented the first 3D mapping rescue robot in Lisbon,
scoring 2nd place. For more information click here. In
2005 the extended team "Deutschland1" entered the competition and
scored sixth (out of 25 teams).
|  |
RoboCup Rescue
RoboCup
Rescue is an international competition in which a mobile robot has
to navigate in a geometrical and sensory challenging environment. The
robot has to find, map, and estimate the condition of so called
victims. The scientific challenges consist of mobility and autonomy.
Research Focus in Onsabrück
- 6D SPLAM. To build a map, the following three tasks have to run in a permanent cycle:
(1) Plan and go to the next scan pose,
(2) localize yourself in the current environment model,
and (3) take a new scan and register it consistently with the previous model.
We call this overall process SPLAM (Simultaneous Planning, Localization, and Mapping).
At any time, the robot pose is to be determined in 6D, i.e., in coordinates x, y, z
and yaw, pitch, and roll angles – wrt. a given coordinate system.
We are working on the respective algorithms. See also the KURT3D project page.
- Autonomous Robot Driving. A hard challenge is to drive mobile robots
in rescue environments. University of Osnabrück focusses on
mastering the orange and yellow arena with a wheeled robot
autonomously. The robot has to determine which surfaces are drivable
using its onboard sensors, such as laser scanners, cameras and
odometry.
We are working on the respective algorithms.
- Multi Robot 3D Mapping. To build a 3D maps efficiently during the
10 minute competition, several robots have to work together. 3D maps
originating from several sources have to be created.
We are working on the respective algorithms.
Robots
2005 - Kurt3D (with RTS 3D ScanDrive) and RTS Crawler

2006

More pictures and videos of the 2006 RoboCup Rescue event can be found
here.
Some Results
-
Turning a seminar room into a rescue arena.



More picutres can be found at our picture gallery.
Autonomous exploration and mapping with Kurt3D.

View the full video (MPG, 7MB).
-
Kurt3D driving on a 2 cm high stepfields.

View the full video (MPG, 4MB).

